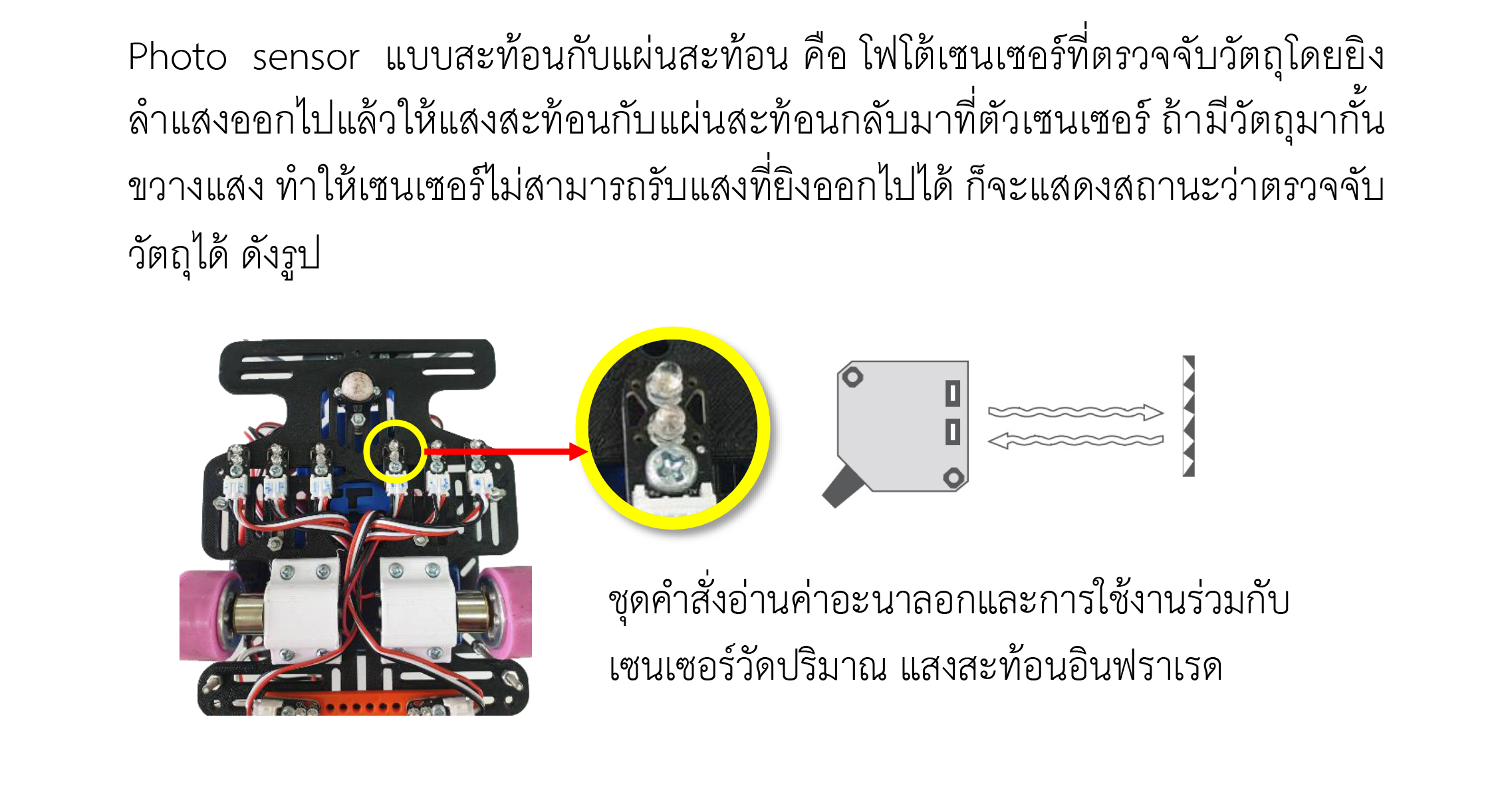
การใช้งานเซนเซอร์วัดปริมาณแสงสะท้อนอินฟราเรดสำหรับภารกิจหุ่นยนต์มีเป้าหมายคือ นำมาใช้งานเพื่อแยกระหว่างเส้นสนาม พื้นและสนามโดยทั้งคู่มักจะมีสีที่แตกต่างกันชัดเจน เช่น เส้นสีดำส่วนพื้นมีสีขาว หรือเส้นมีสีขาวส่วนพื้นมีดีดำ เป็นต้น โดยที่ชุด คำสั่ง อ่านค่าอะนาลอกของ IBIT นั้นจะให้ความละเอียด 12 บิต ทำให้ค่าตัวเลขที่อ่านจากสภาวะแวดล้อมที่เป็นไปได้จะมีค่าใน ช่วง 0 ถึง 4095 โดยสรุปคือเมื่อนำเซนเซอร์ไปตรวจจับวัดปริมาณวัตถุที่มีสีสะท้อนแสงได้ดี ตัวอย่างพื้นมีสีขาวค่าปริมาณการสะท้อนแสง อินฟราเรดที่กลับเข้ามายังภาครับของเซนเซอร์ไปตรวจจับบริเวณ สีดำ ค่าปริมาณการสะท้อนแสงอินฟราเรดที่กลับมายังภาครับ ของเซนเซอร์จะมีปริมาณน้อย ส่งผลให้ค่าที่อ่านได้จะมีค่าน้อยตามไปด้วย
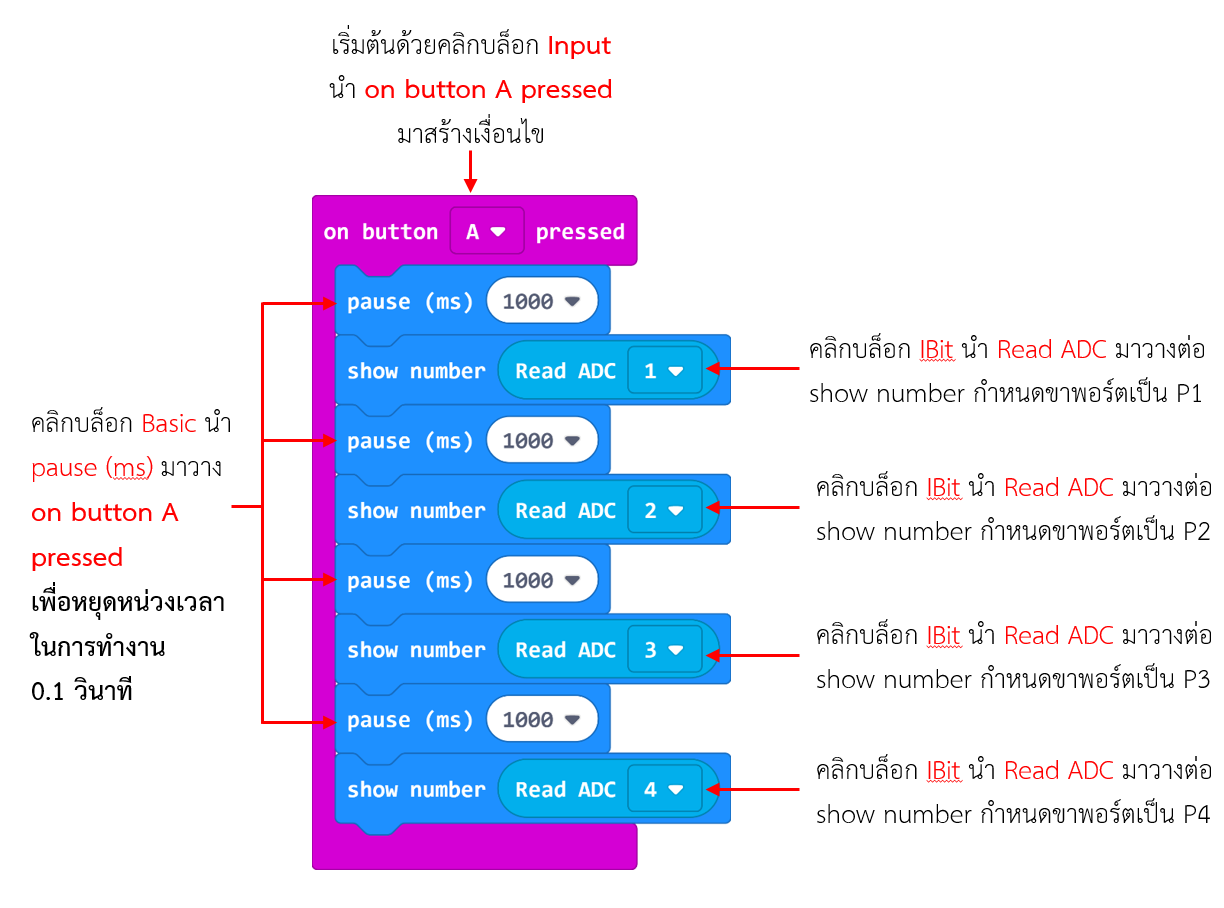
1. การทดสอบอ่านค่าอะนาลอก